Design Blog: Fan Gecko

My name is Binara, and I will be taking you through the entire design process of how I created the fan gecko attachment. The original task was to create a robot that can complete the Alpine robot challenge at RoboRAVE Australia. The challenge requires a robot to climb an 80° incline and deliver a flag to the summit. Further details about the challenge itself can be found on the RoboRAVE website:
Step 1: Research
Every idea has to start somewhere, so the best way to get inspiration is to see what others have done. If your idea doesn’t exist, it can be helpful to break it up into smaller, existing ideas.
As with the other design blogs, we will look into some existing designs. As there are not many existing alpine robots, research was put into wall climbing robots instead:

Many of the existing designs rely on suction properties to stick to the walls, either using fans or suction cups. As the most common design for wall climbing seems to be fans, this is the technique that will be explored for the rover attachment.


Step 2: Prototype
As with most of my designs, the prototype phase consists of generating a 3D design on Autodesk Inventor or Fusion 360 and then 3D printing it. This project also deals with high-current applications so vigorous testing was done on all of the components before they were plugged in.
Step 3: Iterate and Evaluate (Back to the drawing board)
Design 1:
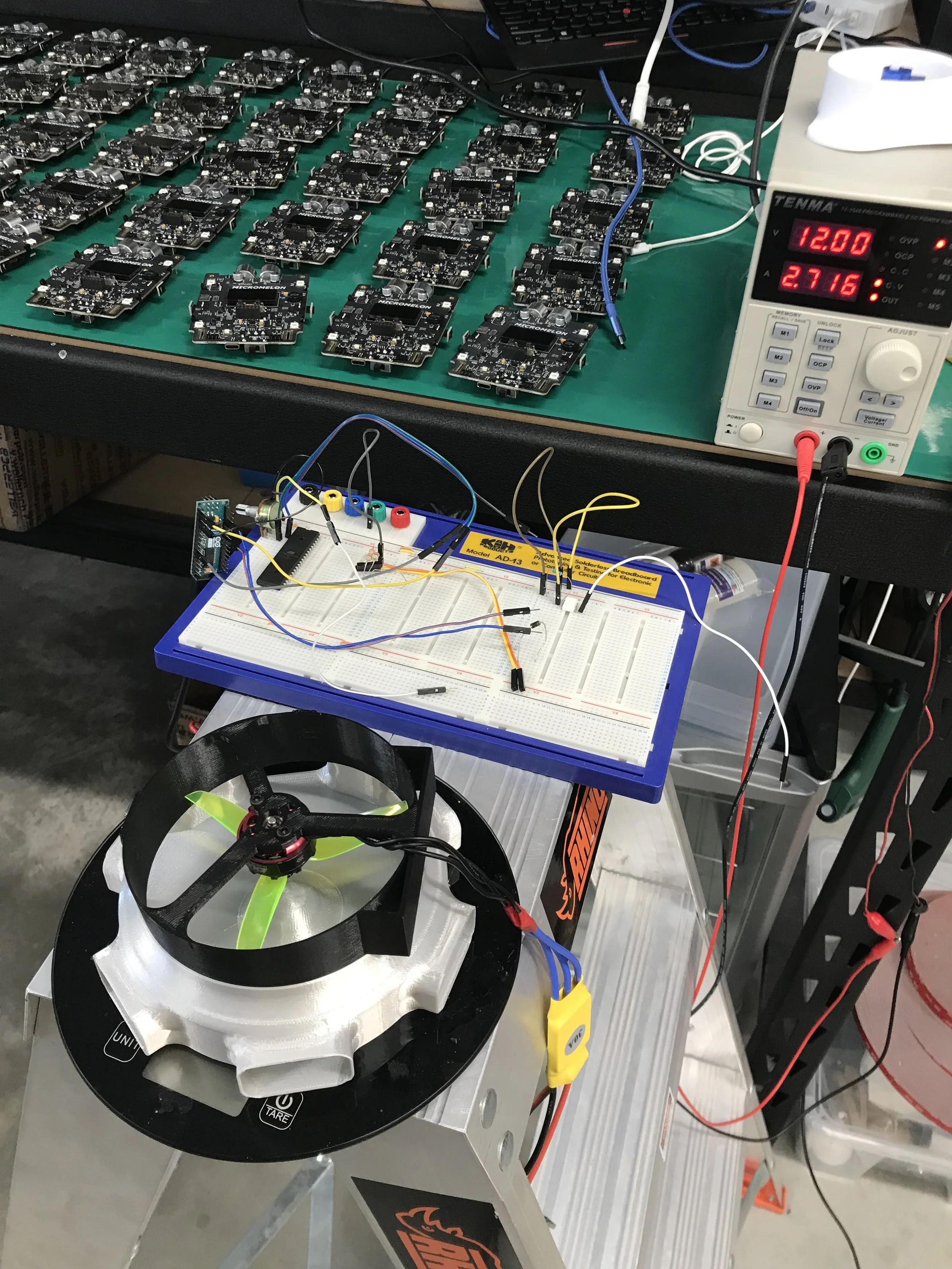
Prototype 1 has been labelled the ‘Spicy Sombrero’. The basic idea for this one is to use drone motors and propellors to create a thrust to push the robot down. Theoretically, when the robot starts climbing the wall, it will not fall backwards as the fan will push it into the wall. By increasing the normal force acting on the rover from the ramp, we hope to increase the friction force to give it better traction.

Notes to fix for the following design:
The force from the propellor is nowhere near enough to affect the rover
The propellor used cannot handle negative pressure, thus can’t move enough air
The design is very bulky and not balanced very well
The rover is not able to mount the ramp from the ground due to weight
Design 2:
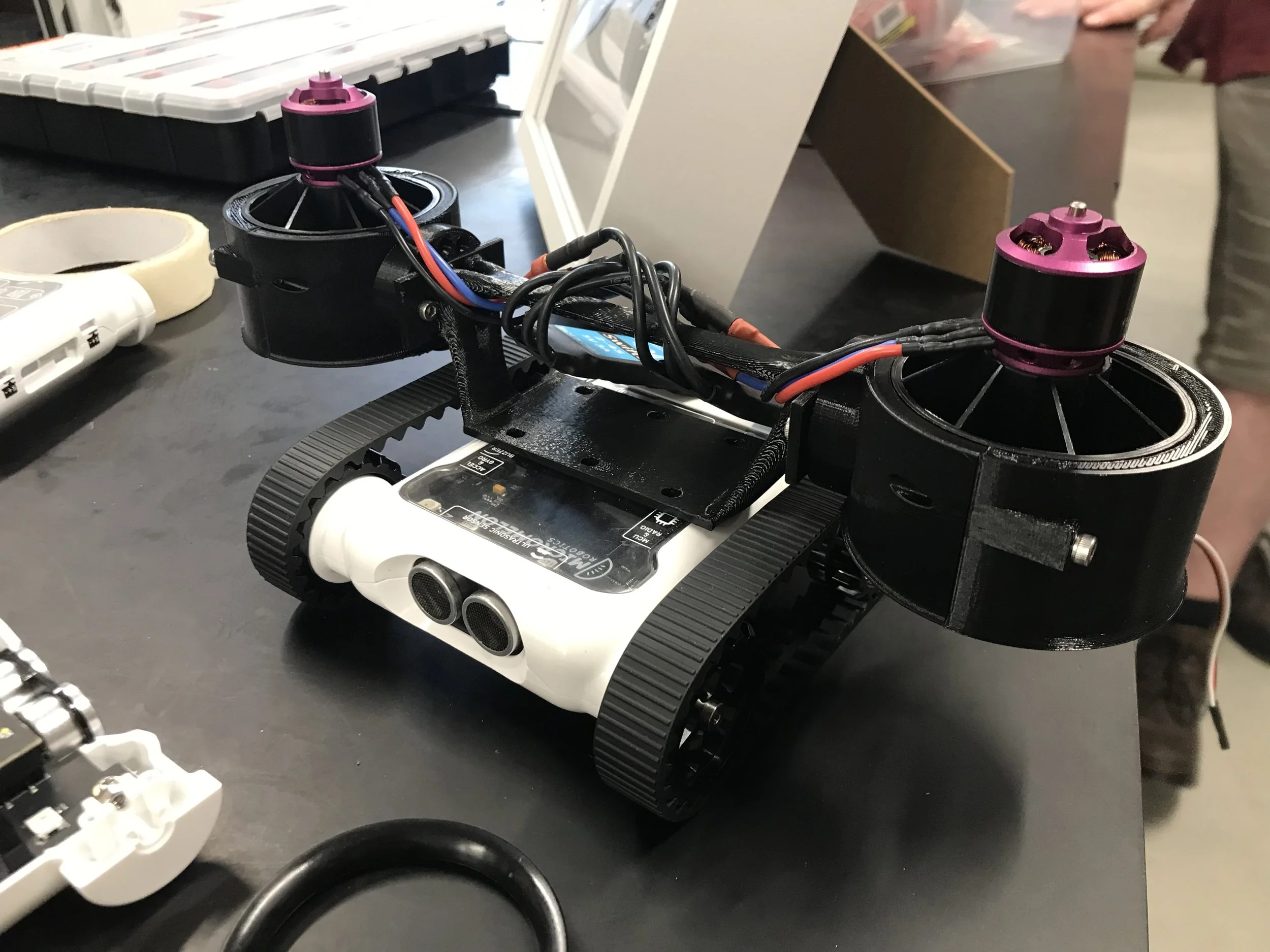
For this design, the standard quadcopter propellor was replaced with 2 EDFs. These are much larger fans that are capable of producing far more thrust, however they are much heavier and consume a lot more power. Due to this, each EDF was powered with its own battery which adds even more weight. To balance the force of the 2 fans, they were attached on either side of the rover. Another benefit of this placement is that the fans can not only create downwards thrust, but they can also make a suction effect to the ground, which will properly sick the rover to the ground.
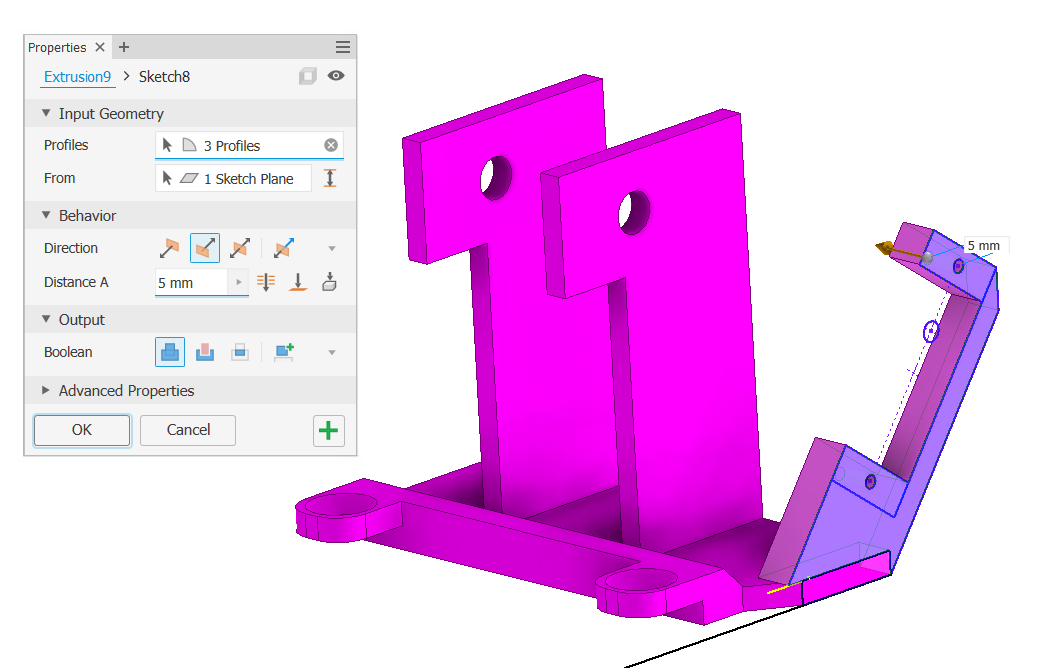
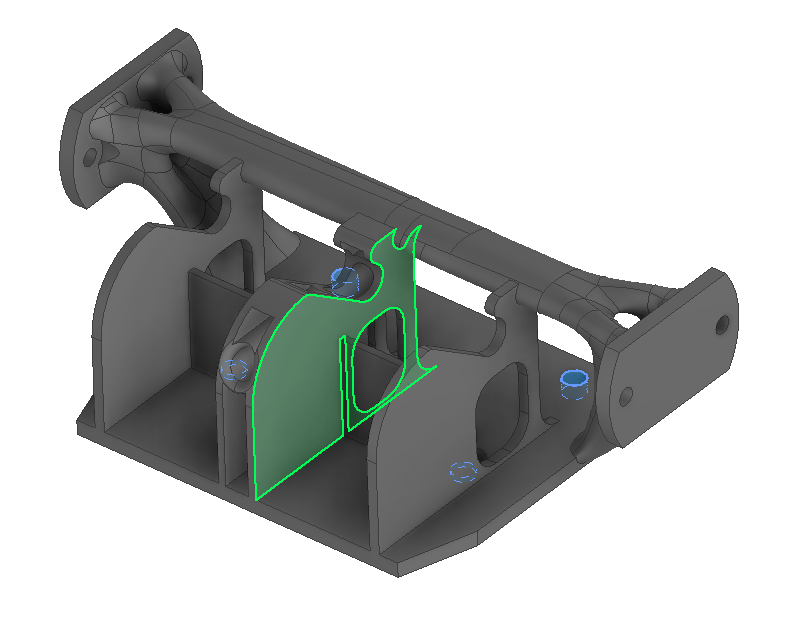
To greatly optimise on mass and strength (as well as aesthetics), generative design was used to create the frame holding the fans. This is the part that undergoes the most force on the rover, so it has to be very strong, but still must be made as light as possible. Generative design is a technique where a generative model (sort of like an AI), creates a part given a set of prompts and conditions. They result in organic-looking objects like the part we made below:
Notes to fix for the following design:
The force from the propellor is nowhere near enough to affect the rover
The propellor used cannot handle negative pressure, thus can’t move enough air
The design is very bulky and not balanced very well
While the rover sticks to the wall, the tracks are unable to move it
The rover is not able to mount the ramp from the ground due to weight
A technique must be implemented to transport the flag to the summit
Design 3:
Realising that the tracks weren’t able to move the rover up the ramp, a sort of VTOL design was incorporated and the EDFs were tilted forwards. This means that the EDFs are now pushing the robot up the ramp as well as into the ramp. Because of this, the rover movement gets a massive power boost so we have to be careful otherwise it might shoot off uncontrollably (has happened). Some other small edits were made to make the structure stronger and neater in terms of cable management. A winch was also added to the front of the robot so that the flag can be pulled up to the summit once the rover is at the top.
To assist the rover in it’s climb to the summit, coding features used the gyro sensor to determine incline angle and required EDF thrust. The fans were also used to assist the rover in getting onto the ramp from the ground. A braking technique was used where the idle fan power served as a brace while the flag was being winched to the top. The colour sensors were used to locate the end of the ramp, and assisted with navigation on the summit.


Final design review:
The force from the propellor is nowhere near enough to affect the rover
The propellor used cannot handle negative pressure, thus can’t move enough air
The design is very bulky and not balanced very well
While the rover sticks to the wall, the tracks are unable to move it
The rover is not able to mount the ramp from the ground due to weight
A technique must be implemented to transport the flag to the summit
Step 4: Finalise
And finally, after many, many iterations, the design works. Now all that’s left is to consider a couple options to make the design perfect in the future. Some considerations could be:
Ease of Assembly: How easy is it to put the design together? Maybe screws could hold a part better than glue, or you could add a space near a bolt to easily get a tool into it.
Cost: How much material does it use? There may be a way to use less plastic or cardboard. Is there another way to orient the model to make the prints faster?
Aesthetic: How does it look? Yes, we also enjoy looking at the finished product and thinking, ‘Wow, that looks awesome’. You could change the shape of the design to look more professional. Add a logo? Maybe coordinate the colour of your prints to make the appearance really pop.