My name is Binara, and I will be taking you through the entire design process of how I created the sumo flipper attachment. The original task was to create a unique solution for sumo battles. An additional condition is that the rover must not have any expansions (ie. extra microcontrollers, motors, or power sources).
Step 1: Research
Every idea has to start somewhere, so the best way to get inspiration is to see what others have done. If your idea doesn't exist, it can be helpful to break it up into smaller, existing ideas.
The best way to research for sumo is to take a look at robots from many different battles, as well as looking into battlebot designs.
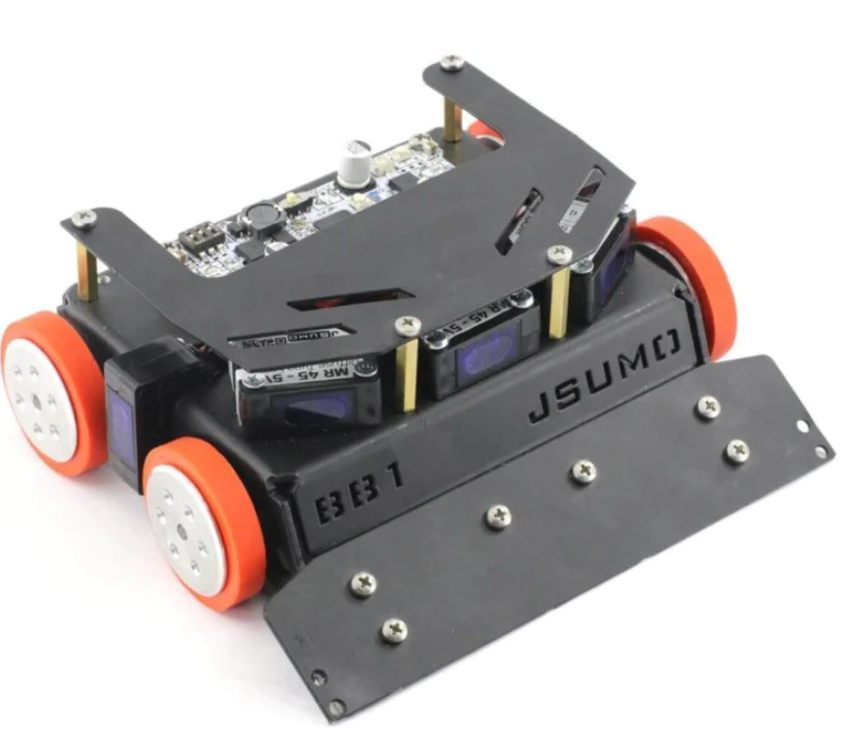
Reference designs from existing sumo robot battles
Existing sumo robot designs vary a great deal with some techniques being a great solution for some robots but a poor solution for others. Given this, there are still discernible trends among the winning robots. Looking at these designs, the robots try to have wheels with good traction and downforce to make sure it doesn't slip.
Many of these robots also have a ramp at the front with the Maker's Muse robot going so far as to have a lever arm at the front to flip other robots.
Step 2: Prototype
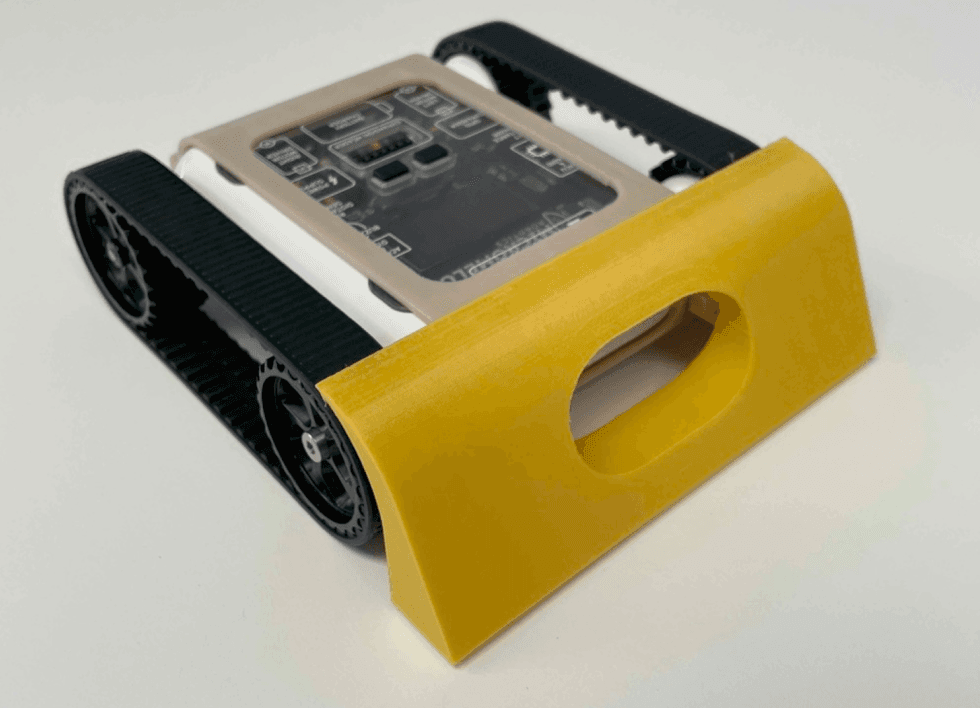
As with most of my designs, the prototype phase consists of generating a 3D design on Autodesk Inventor or Fusion 360 and then 3D printing it.
CAD model of the Sumo Flipper prototype
Step 3: Iteration and Design
This design blog is a little different to the others in the sense that there were no largely different iterations. In this design, the progression was the addition and refinement of unique features along the way. Here, I will take you through numerous features of the sumo attachment and why I designed them this way. The sumo robot consisted of a flipper at the front to flip incoming opponents, and special traction wheels at the back for defensive purposes.
Silicone Casting:
The first technique experimented was crafting custom wheels for the rover. While the tracks on the rover provide some traction, they are made of TPU which is a harder rubber. To increase the traction of the rover, additional wheels were created for it using 2-part silicone. The process is the following:
-
Create the mould and the insert. The inner part of the wheels still needs to be hard, so this will be 3D printed. The insert will have a special structure designed for liquid silicone to flow through, harden, and interlock to the piece.
-
With the piece secured in the mould, the next process will have to be done quickly, as the silicone quickly hardens. Part A and B were mixed, stirred, and slowly poured into the mould until it was filled to the brim. Unfortunately we don't have images of the casting, however the process was similar to the demonstration from crafty arts.
-
After a few hours, the outer casing of the mould (sacrificial) was destroyed to obtain the complete silicone wheel.
This wheel has incredible grip and is very very soft. With this in use, a very large force is required for the robot to lose traction.

Silicone casting process for the custom rover wheels
Clutch System:
The point of the silicone wheels is defeated if we simply have them free-rolling. That's why the next feature of the sumo flipper is the use of clutch bearings. Clutch bearings are a type of roller bearing that spins freely in one direction, but locks up tight when rotating the other direction. The first version was a print-in-place experiment to gauge whether the clutch bearing theory would actually work. Some tests were conducted and the print worked much better than expected, however it wore out quickly.
With the confirmation that clutch bearings work, steel manufactured bearings were obtained with springs to assist the internal clutch. This version worked very well and was implemented into the design.

3D-printed clutch bearing test design
Flipper and Linkage:
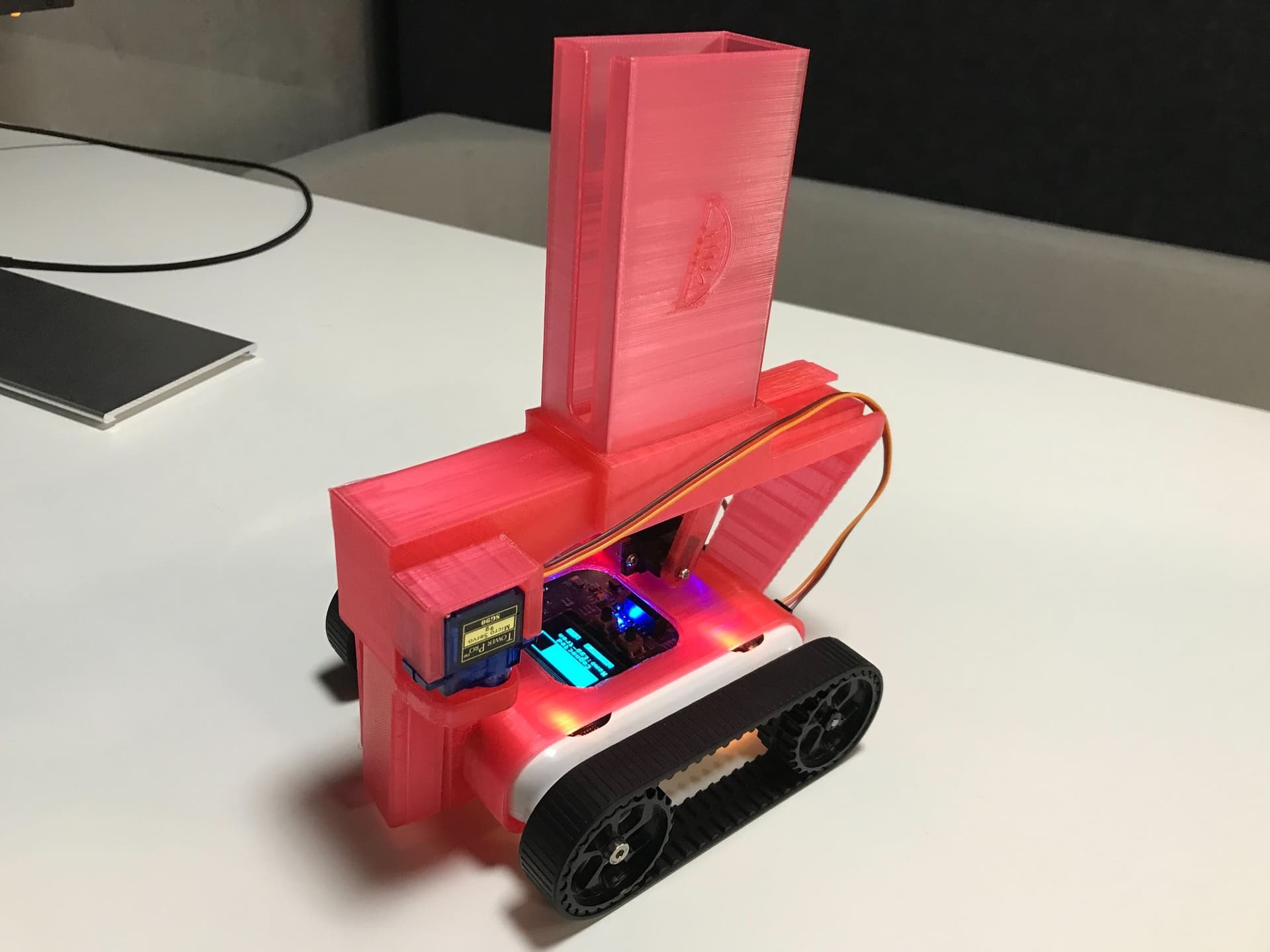
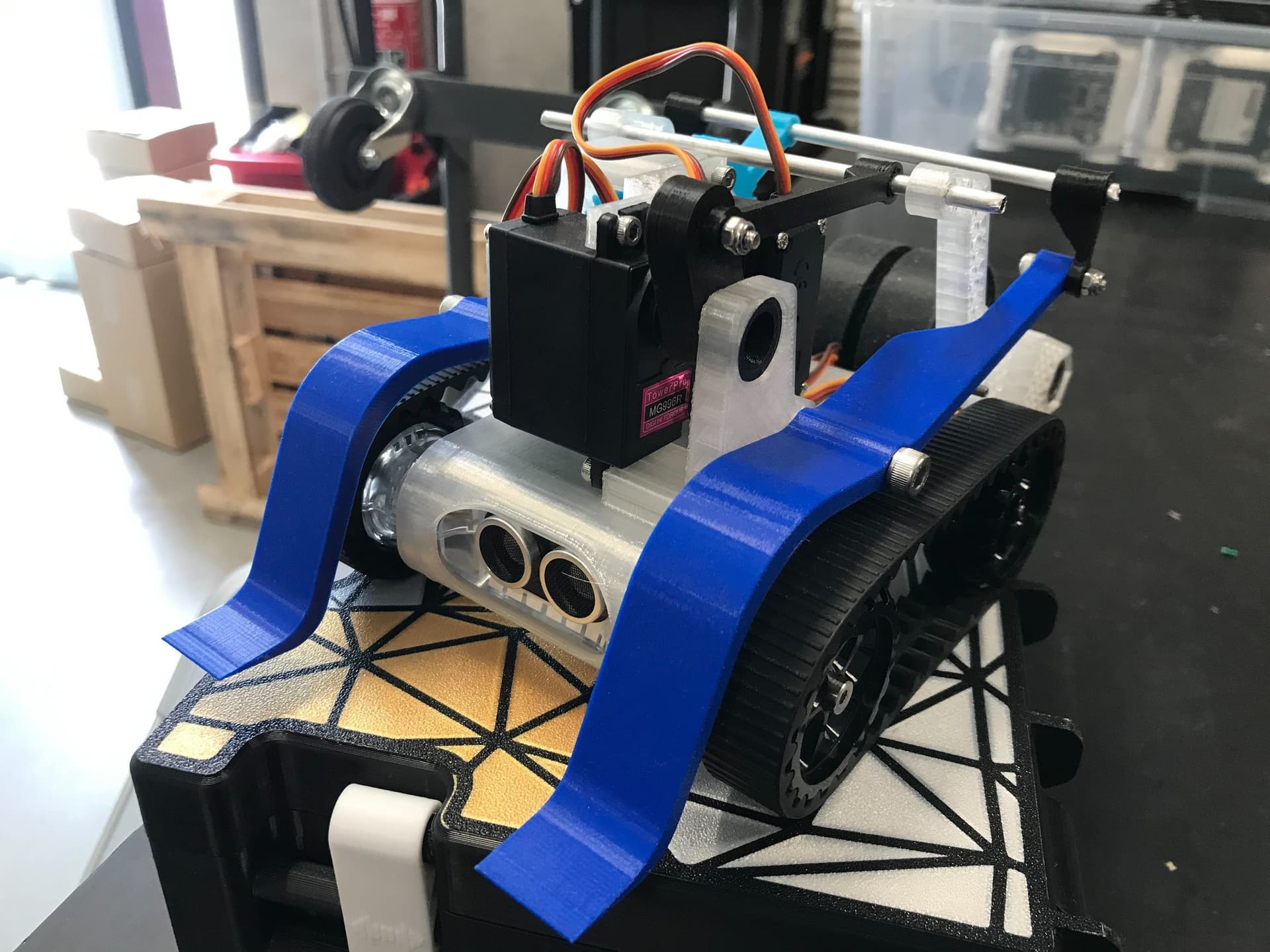
Finally, the offensive system for the robot is the flipper mechanism at the front. This has been done using a first order lever with gears to increase the strength of the servo. With the use of a larger servo, this allowed the flippers at the front to lift just over 1kg which is perfect for the 1kg robot category.
The clutch system at the back was also attached to a lever as the wheels cannot touch the ground while the robot is turning. Because of this, the paths of movement between the flipper and the clutch system had to be carefully coordinated as seen in the black and pink link paths below.
While the flipper could lift a kg, an issue we came across was that instead of lifting the opponent, the flipper would lift the rover off the ground instead. To combat this, the clutch system was located at the back to provide counterweight, but when the clutch wheels engage, they actually assist in partially lifting the robot off the ground, and descend even lower than the level of the tracks of the rover. This ensures that the rover still has maximum contact, even if it's been lifted off the ground.

Assembled Sumo Flipper rover with the front lever flipper
Step 4: Finalise
And finally, after many, many iterations, the design works. Now all that's left is to consider a couple options to make your design perfect in the future. Some considerations could be:
-
Ease of Assembly: How easy is it to put the design together? Maybe screws could hold a part better than glue, or you could add a space near a bolt to easily get a tool into it.
-
Cost: How much material does it use? There may be a way to use less plastic or cardboard. Is there another way to orient the model to make the prints faster?
-
Aesthetic: How does it look? Yes, we also enjoy looking at the finished product and thinking, 'Wow, that looks awesome'. You could change the shape of the design to look more professional. Add a logo? Maybe coordinate the colour of your prints to make the appearance really pop.
Now that you have seen the full design journey, try building the final version yourself.